A collaborative effort to lower the barrier to entry for researchers studying the control of robotic prosthetic legs
Research groups focused on prosthetic control algorithms were each developing their own robotic leg systems in isolation, making it nearly impossible to compare control strategies, replicate findings, or build upon each other's work. This fragmentation was preventing controls researchers from focusing on their core expertise. Each custom hardware development required $300k+ in funding and years of dedicated work from multiple PhD researchers, forcing controls-focused labs to spend resources on hardware engineering rather than advancing control algorithms.
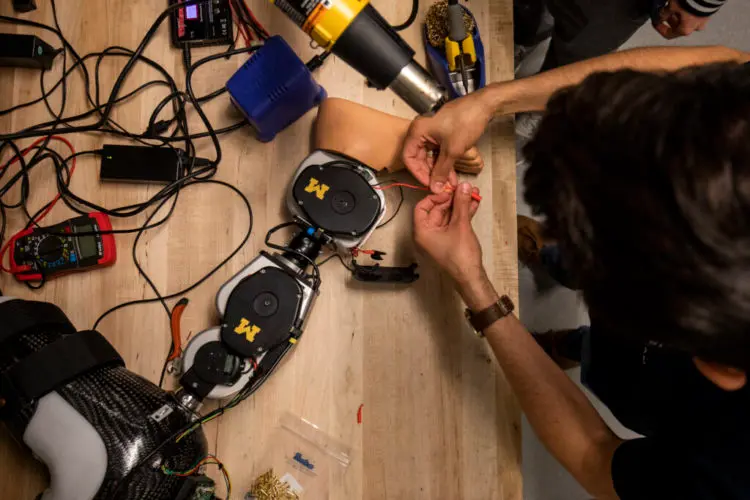
An end-to-end open-source platform that provides researchers worldwide with standardized hardware designs, software libraries, electronics, and comprehensive documentation to ease the development of state-of-the-art prosthetic control algorithms, ultimately improving the lives of people with disabilities.
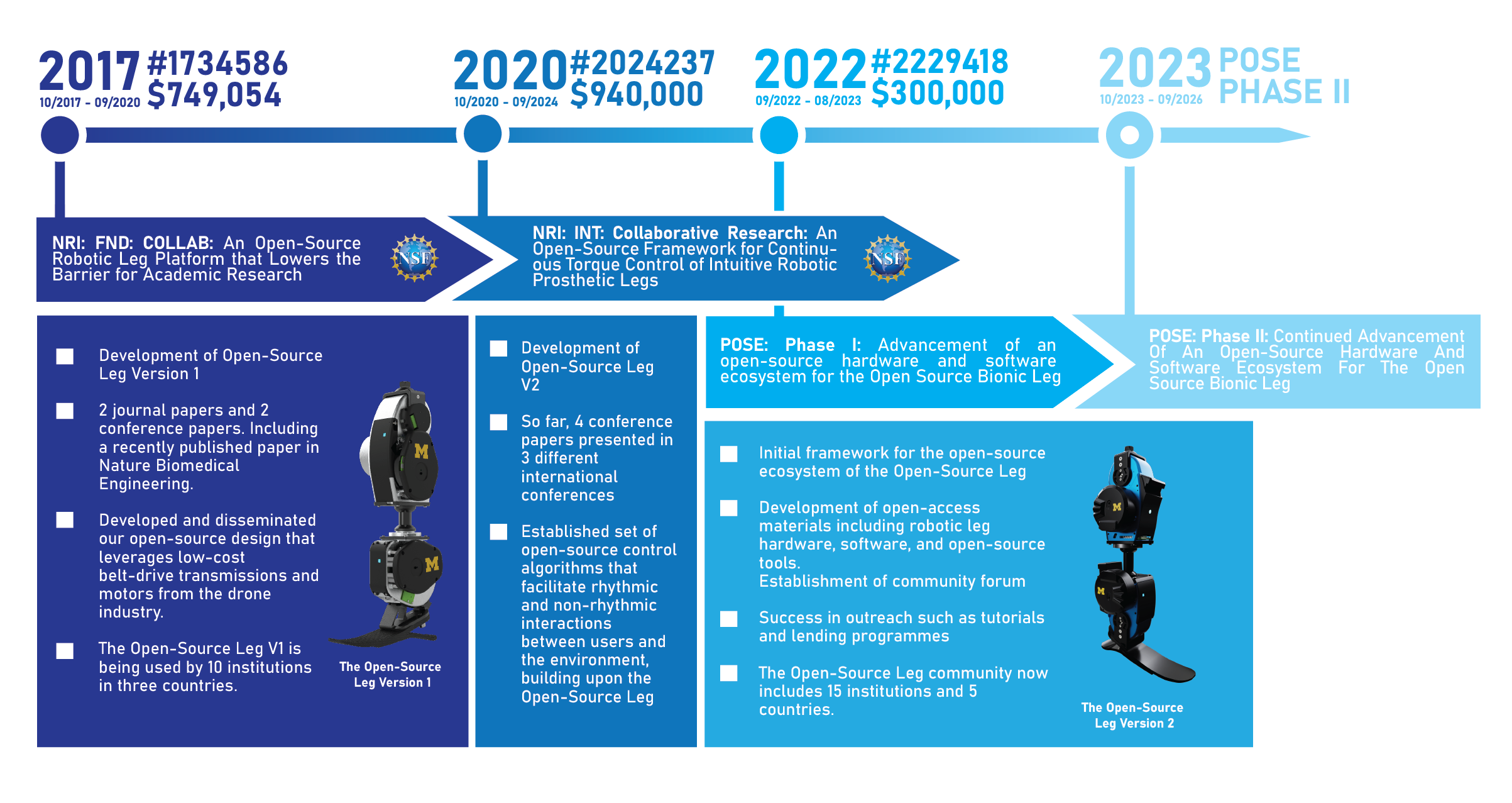
The Open-Source Leg project has been continuously supported by the National Science Foundation (NSF) through multiple grant programs, enabling sustained development and community growth over seven years.
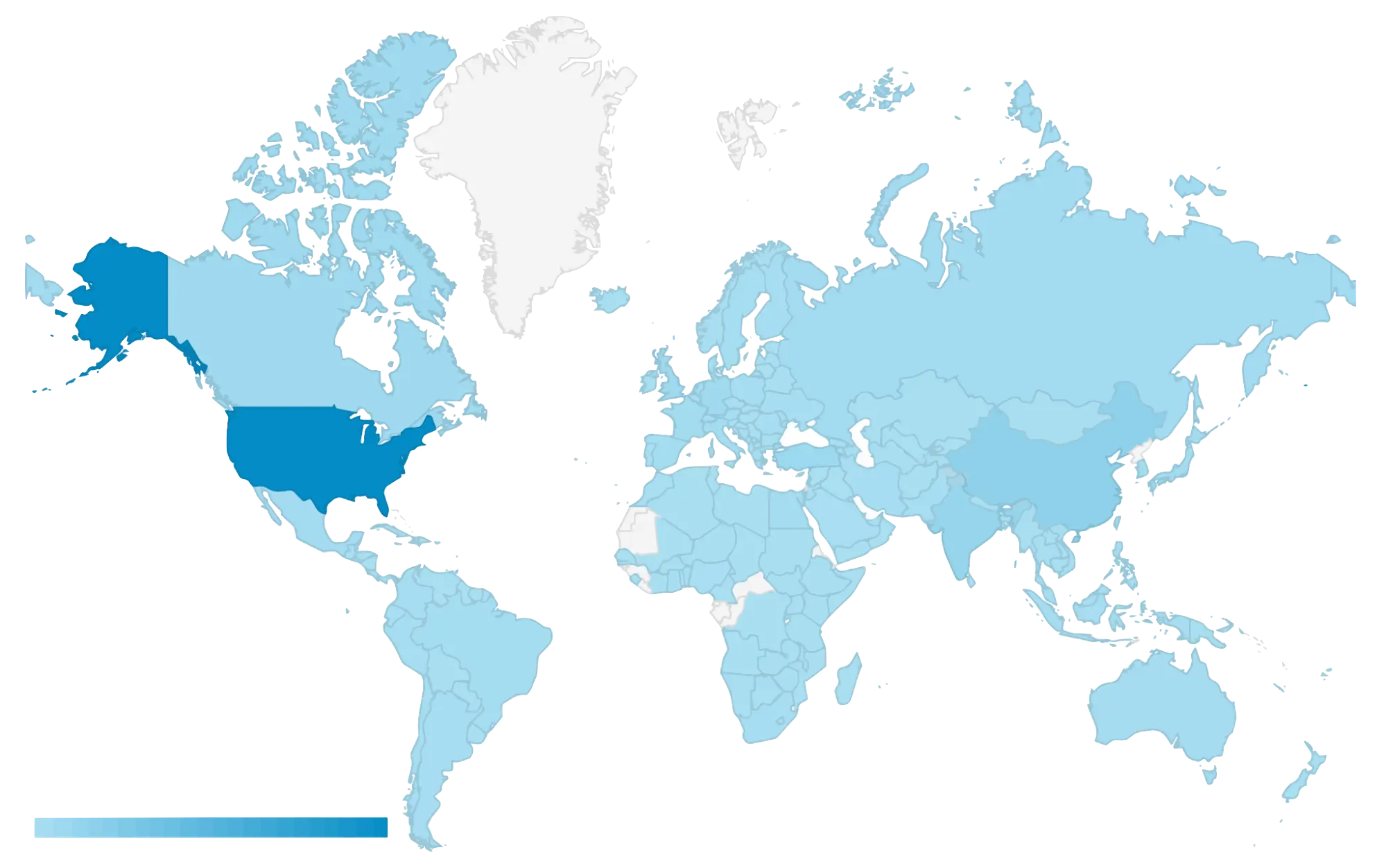
Our platform is actively used by researchers, engineers, students, and institutions worldwide, fostering collaboration and advancing prosthetics research globally.
Our project operates under a Benevolent Dictator for Life (BDFL) model with Prof. Elliott Rouse serving as the principal investigator, supported by a Governance Advisory Board comprising esteemed professors and directors from research groups that contributed during the project's foundational phase.

This structure balances focused leadership with collaborative decision-making, ensuring both efficiency and inclusivity in our development process. While the BDFL model provides clear direction and consistent vision, we distribute core responsibilities among key community members to minimize dependency on single leadership and foster project resilience. Through biannual board meetings, transparent communication channels, and active community engagement, we maintain alignment with our original goals while adapting to new challenges and opportunities.

We are committed to making participation in our project a harassment-free experience for everyone, regardless of age, disability, ethnicity, gender identity, experience level, education, nationality, race, religion, or sexual orientation. Our standards emphasize welcoming and inclusive language, respect for differing viewpoints, graceful acceptance of constructive criticism, and empathy towards community members.
Project maintainers are responsible for clarifying standards of acceptable behavior and taking appropriate corrective action in response to violations. Instances of unacceptable behavior may be reported by contacting the project team at opensourceleg@gmail.com. All complaints will be reviewed confidentially and investigated, resulting in responses deemed necessary and appropriate to the circumstances.
All components of the Open-Source Leg are released under carefully chosen open-source licenses that balance accessibility with practical adoption. While our licenses provide commercial flexibility, we highly encourage sharing improvements to strengthen the community.
User-focused weak copyleft license that protects software freedom while allowing commercial applications.
Free to use for any purpose
Build commercial software using our libraries
Modifications to OSL software must remain LGPL
Clear separation between OSL and your application
Permissive open hardware license providing flexibility for commercial use without sharing obligations.
Free to use, modify, and manufacture
Commercial distribution without sharing requirements
Keep acknowledgments and disclaimers intact
Clearly identify and document modifications
Our diverse team of researchers, engineers, and students from around the world collaborates to advance prosthetics technology and make it accessible to everyone.

Biomechatronics Engineer
Apple
Software Engineer
Nuro

Simulation Engineer
Stellantis

Business Engineer
Habib Makina

Researcher
U-M Robotics

PhD Candidate
U-M Robotics

PhD Candidate
U-M Robotics

PhD Candidate
U-M Robotics

PhD Candidate
U-M Robotics

Post Doc
U-M Robotics

Undergraduate Student
U-M Robotics

Undergraduate Student
Univ. of Miami BME

Undergraduate Student
U-M ME

Undergraduate Student
U-M Robotics

Undergraduate Student
U-M ME

Undergraduate Student
UT Austin

Undergraduate Student
U-M Robotics

Undergraduate Student
NIT Trichy

Undergraduate Student
U-M ECE

Undergraduate Student
U-M ECE

Graduate Student
U-M Robotics

Graduate Student
U-M Robotics

Undergraduate Student
U-M Robotics

Photographer
U-M COE
Join our wonderful community of students, engineers, and researchers driving groundbreaking advancements in prosthetics.





