Open-Source Leg
An end-to-end open-source platform that makes prosthetics research more accessible, collaborative, and reproducible.
An end-to-end open-source platform that makes prosthetics research more accessible, collaborative, and reproducible.
We want to give people access to the tools needed to overcome the barriers preventing these technologies from impacting the lives of people with disabilities.
Essential tools and resources for building, testing, and iterating
on next-generation prosthetics control systems or general robotics applications.
The Open-Source Leg hardware is a robust and relatively inexpensive system that can be easily manufactured, assembled, and controlled.
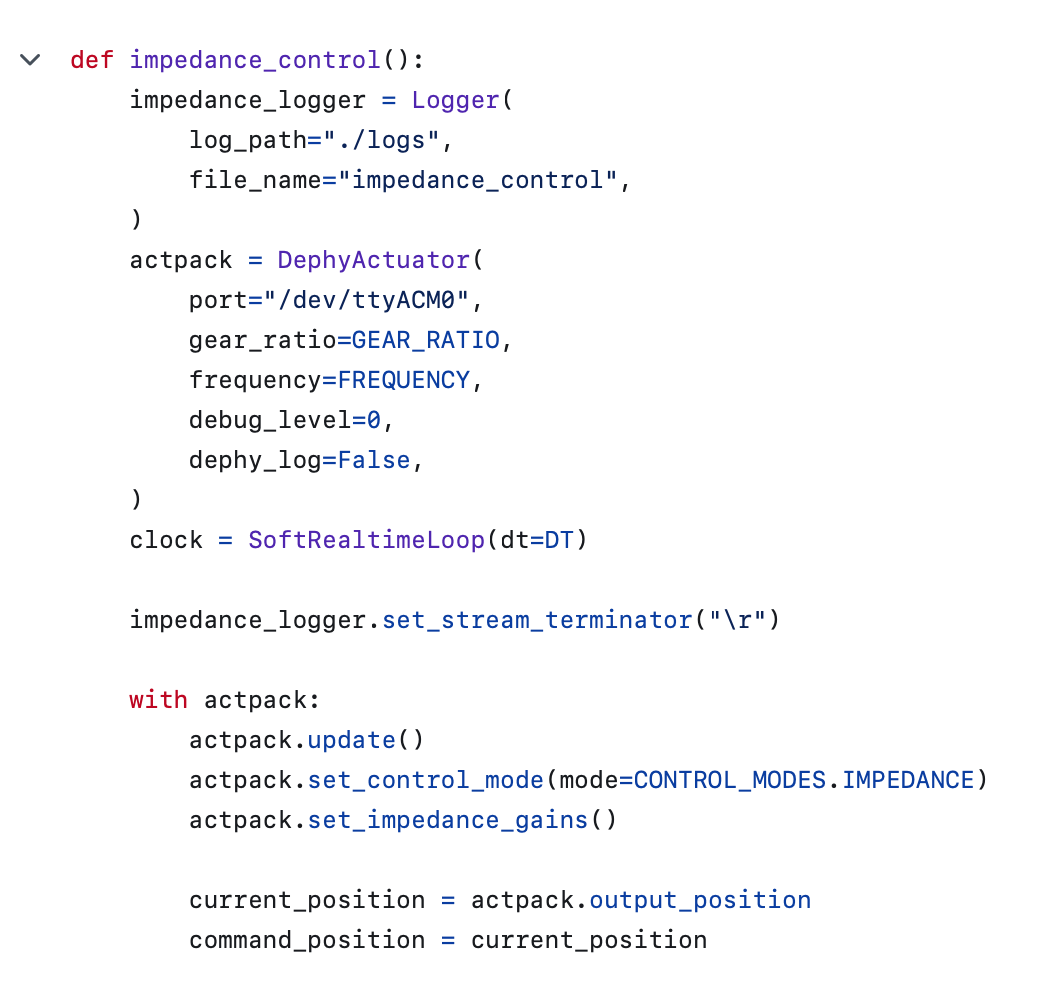
The Open-Source Leg software is designed to be modular and flexible to allow for easy integration with a wide variety of sensors and robotics frameworks. The software library is written in Python and is compatible with Python 3.9 and above.
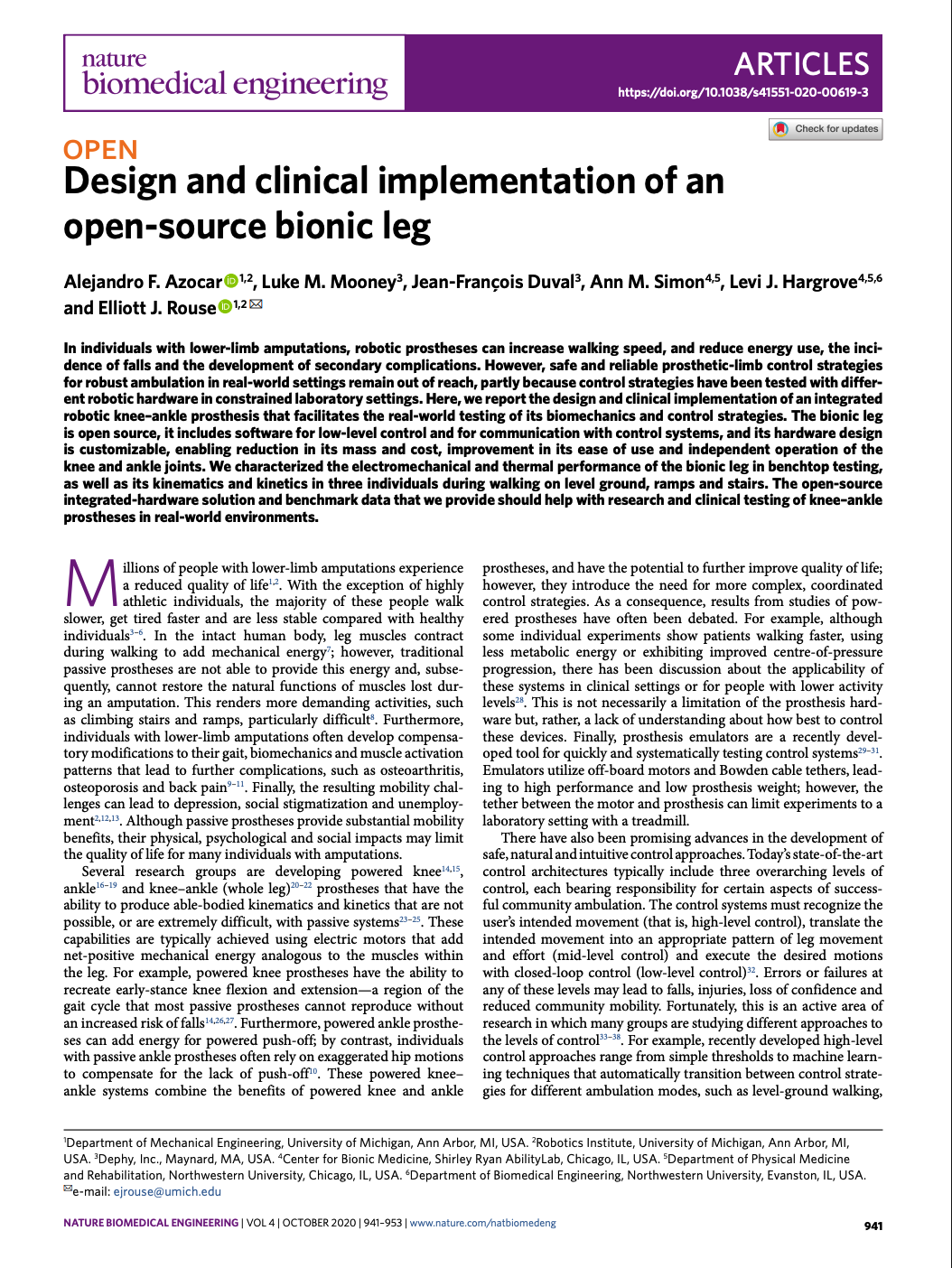
The platform was founded to enable direct comparisons between different prosthetic control strategies and algorithms across standardized hardware. Explore cutting-edge research publications and datasets from the Open-Source Leg community.



Our open-source tools are continuously improved through community contributions & testing across research institutions worldwide.
Based on data collected over the last 6 months.


